Speed and safety work together for collaborative robots


Brian Carlisle, CEO of Precise Automation, will be giving a presentation on speeding up collaborative robots, as part of the Collaborative Robots: Getting Started session on April 4 from 1:30 pm to 3 pm at Automate 2017 in Chicago. Contact him at [email protected].
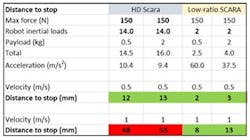
The interest in allowing collaborative robots to work safely next to people in the same work volume without the need for safety screens is growing. In 2016, ISO standard ISO/TS 15066:2016, Robots and robotic devices—Collaborative robots, was published listing safe levels for collision forces that would not cause injury to people. A typical value for a safe collision force with a human is 150 Newtons. In order to comply with this standard many robot users have had to dramatically slow down the operating speed of robots, if there is any chance the robot could collide with a human.In most robots, when a collision occurs the control system commands maximum motor torque, and the moving mass of the robot, payload and the forward reflected inertia of the motor and drive elements generate a collision force determined by the velocity and stopping distance, which determine the deceleration force. The stopping distance is determined by the allowable force, the compliance, or stiffness, of the part of the human body that is struck, the compliance of the robot structure that strikes the person and whether the collision occurs in free space or traps the human against a rigid surface. The stopping distance can typically vary from a few millimeters to a few centimeters, depending on these factors.
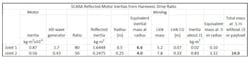
As an example, a common SCARA robot design uses high ratio speed reducers to drive the inner link and the outer link. The forward reflected inertia of the high-speed drive train elements including the motor shaft and wave generator in the harmonic drives, which, when multiplied by the square of the reduction ratio, can be far greater than the robot typical payload. For example, in Table 1, the forward reflected inertia gives a total effective mass at the tool without any payload of 14 kg. Given that the typical working payload for this class and size of robot is less than 2 kg, these reflected inertias are more than six times the inertia of the payload and greatly increase the dynamic collision force.
Further, it is possible to limit the motor torque in a collision to a small percentage of the total available motor torque, for example 25% or less, thus further reducing collision forces which are a combination of dynamic forces and forces from motor torques.

We use a control algorithm that solves a complete dynamic model of the robot in real time to continuously compute the motor torques for the next planned motion of the robot. This model includes all the coupled torques from other axes, including an offset payload, the Coriolis forces, gravity forces and friction forces. Once the motor torques have been fed forward to the controller, there remains a feedback control loop, utilizing a classical PID structure, which measures any remaining position and velocity errors and multiplies these errors by gains to generate a PID error torque, which is added to the feed-forward torque to comprise the total motor torque command. For robots with low ratios and low friction, the PID error torque can be as low as 10% of the total available motor torque.
It is therefore possible to set a low limit on the PID error torque, for example 10% or 25% of total available motor torque, which limits the motor torque contribution to both low-speed and high-speed collisions. For the harmonic-drive SCARA robot in Table 1, the unlimited peak motor torque multiplied by the ratio can generate a collision force of 1,120 Newtons, even at low speeds. For the collaborative robot, the above control algorithm can limit the low-speed collision force from the motor torque to 60 N.
It is possible to reduce the collision force of a robot by a combination of mechanical design and control-system design and thus increase the operating speed for a given safe collision force.
