If the shoe fits: sizing motors and drives for your application
Key Highlights
- Moving fluids like air or water requires a normal-duty drive with variable torque, whereas moving solids requires a heavy-duty drive capable of handling continuous torque at lower speeds.
- Motors must be sized based on the specific speed and torque demands of the load, while variable frequency drives (VFDs) are chosen based on current—full load amps—and the required overload capacity.
- Compiling application data onto a structured worksheet ensures clear communication with integration specialists, helps build an accurate drive profile and provides a valuable reference for future maintenance.

Finding the right size motor could be considered almost like finding the correct pair of shoes. Machines need a motor that fits the application. People need shoes that fit the activity. Thus, what activity is involved in the application of the motor? For instance, if you are playing rugby, you don’t buy sandals.
If you need to flatten 40 tons of metal, then you are not going to swing a hammer, you are going to create a press with hydraulics and some large motors to drive the mill—buy your machine cleats, not sandals.
Since motors are paired with drives, it is easy to size the drive based on the motor size and application. Shoes work better with good socks, right? Then there are other considerations like torque requirements or, say, “traction.” Motor torque usually is an indication to the drive application. Two types of torque are continuous and intermittent. For instance, a runner on the track would just need torque ramping at the start, and then it’s full speed ahead. Those shoes are different than if a rugby or football player needs quick movement and short sprints. A track distance runner would also use lighter shoes. Motor and drive setups can vary like shoe bottoms depending on the torque, speed and acceleration required in an application.
Torque is a force usually measured in foot pounds and is force (lb) x radius (ft) around a point of rotation. Variable torque changes with operating speed requirements. Examples are fans, centrifugal blowers and mixers, pumps.
The relationship between speed, torque and power could look like the graph in Figure 1.
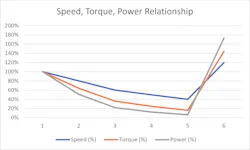
Above a 100% speed, torque is proportional to speed squared. Power is proportional to speed cubed. A typical assumption is, if speed is cut in half, then power drops to an eighth. Power and torque can exceed the motor rating quickly. This makes the motor-drive relationship interesting.
Why? The application dictates what is happening with the torque and the speed. For instance, a variable torque load may be used on fans or pump motors and apply affinity laws. Another way to look at it is if you were a race car driver with fancy driving shoes on, you would shoot for smooth, and you want to shift like “slow is smooth, and smooth is fast” to reduce upset in the curves. Using variable torque helps motor applications be smooth with the motor running more slowly.
Get your subscription to Control Design’s daily newsletter.
Think about the behavior of some applications in comparison (Table 1).
Then think about motor-drive sizing in relationship to the characteristics of the application (Table 2).
Finally, think about the energy use and the heat buildup (Table 3).
Thus, is there a practical sense to thinking about motor and drive sizes? If it spins air or water, then using variable torque and a normal duty drive probably will work. If it moves a solid or needs higher torques at lower speeds, then it’s a continuous torque function and requires a heavy-duty drive.
Variable torque requires a variable frequency drive (VFD) with power ≈ motor hp, overload ~110%. Continuous torque requires a variable frequency drive with power ≥ motor hp, often next size up, overload ~150%.
The next step would be how to size wiring and disconnects and circuit protection. This is dependent on full load amps that the motor puts out. The VFD does not change your conductor sizing. Determining torque and speed requirements allow for sizing a motor based on torque. The drive should be chosen based on current plus the overload. The application is the determining factor for both torque and speed.
Sometimes it’s best to summarize application and load data to help determine motor and drive sizing. Using a worksheet to take notes is helpful. An example worksheet is provided (Figure 2). Using this type of worksheet to compile data for the application build or for specifying a motor is a great tool to communicate to the integrator or the drive specialist to make sure it’s clear as to how the motor-drive setup is used in an application. It also helps build a drive profile when installing a drive. Keeping such information will be handy for maintenance if the drive and motor combo gets replaced. Who doesn’t like buying their machine a new pair of shoes?
About the Author

Tobey Strauch
Arconic Davenport
Tobey Strauch is currently managing brownfield installations for controls upgrades at Arconic Davenport. She has previously worked as principal controls engineer and before getting her bachelor’s in electrical engineering, was a telecommunications network technician. She has 20 plus years in automation and controls. She has commissioned systems, programmed PLCs and robots, and SCADAs, as well as managed maintenance crews. She has a broad mix of mechatronics with process control. She enjoys solving problems with Matlab and Simscape. Contact her at [email protected].
